DIMT: Double-Integrator Minimum-Time Steering Method
For more details see section IV of the following publication:- T. Kunz, M. Stilman. Probabilistically Complete Kinodynamic Planning for Robot Manipulators with Acceleration Limits. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014. [pdf] [mp4] [youtube]
Time-Optimal Path Following with Bounded Acceleration and Velocity
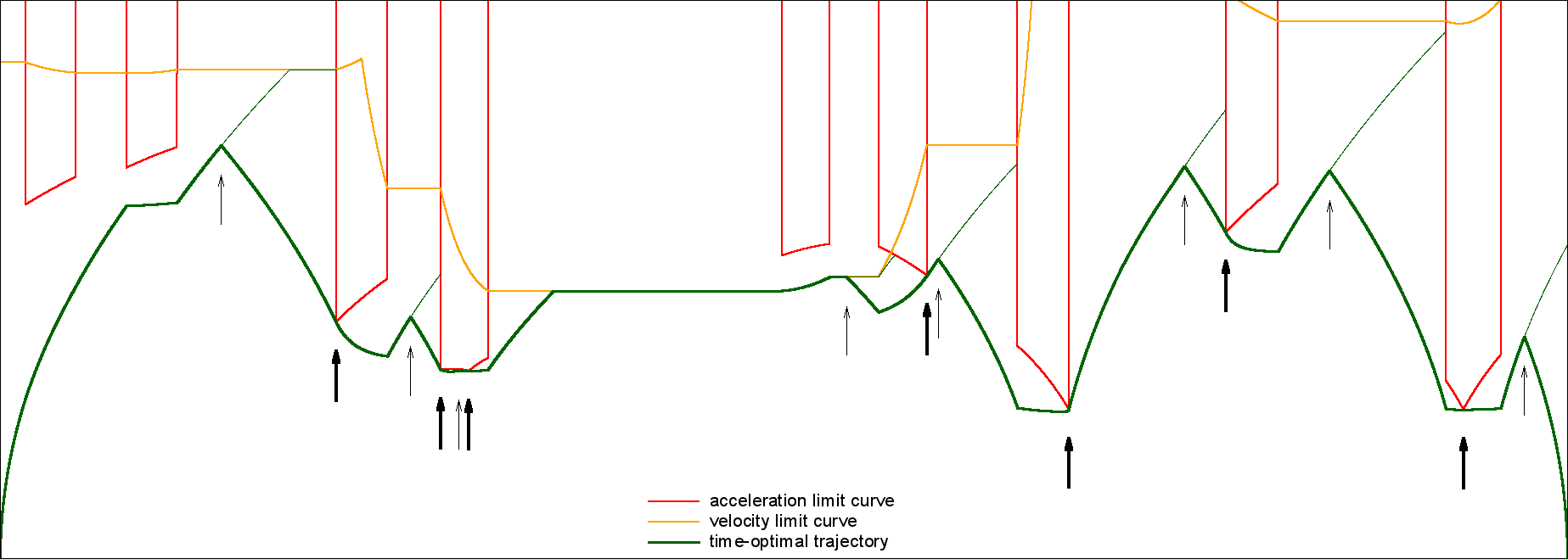 Geometric sampling-based planners usually output a path consisting of straight-line segments. Robot arms cannot directly execute such a path without stopping at every waypoint or deviating from the path. In addition, one needs to decide how fast to execute the planned path such that the robot's capabilities are not exceeded. This software provides a systematic way to solving this problem. It first smoothes the path adding circular blends around each waypoint. This is done in such a way that the smoothed path does not deviate from the original path more than allowed by the user. In a second step the software finds the time-optimal trajectory that follows this smoothed path exactly and satisfies joint acceleration and velocity limits. Our work builds on existing work on this problem but provides additional improvements that make the algorithm more robust in the presence of numerical inaccuracies and therefore usable for real applications.
For details on the algorithm see the following publication:
Geometric sampling-based planners usually output a path consisting of straight-line segments. Robot arms cannot directly execute such a path without stopping at every waypoint or deviating from the path. In addition, one needs to decide how fast to execute the planned path such that the robot's capabilities are not exceeded. This software provides a systematic way to solving this problem. It first smoothes the path adding circular blends around each waypoint. This is done in such a way that the smoothed path does not deviate from the original path more than allowed by the user. In a second step the software finds the time-optimal trajectory that follows this smoothed path exactly and satisfies joint acceleration and velocity limits. Our work builds on existing work on this problem but provides additional improvements that make the algorithm more robust in the presence of numerical inaccuracies and therefore usable for real applications.
For details on the algorithm see the following publication:
- T. Kunz, M. Stilman. Time-Optimal Trajectory Generation for Path Following with Bounded Acceleration and Velocity. Robotics: Science and Systems (RSS), 2012. [pdf] [url]
DART: Dynamic Animation and Robotics Toolkit
DART (Dynamic Animation and Robotics Toolkit) is a collaborative, cross-platform, open source library created by the Georgia Tech Graphics Lab and Humanoid Robotics Lab. The library provides data structures and algorithms for kinematic and dynamic applications in robotics and computer animation. DART is distinguished by its accuracy and stability due to its use of generalized coordinates. For little more than one year I led part of the development team of DART. Building on the great work of Prof. Karen Liu, I led efforts to make the software better suited for robotics.