Motion Planning for Manipulators with Acceleration Limits
We introduce acceleration-limited planning for manipulators as a middle ground between pure geometric planning and planning with full robot dynamics. It is more powerful than geometric planning and can be solved more efficiently than planning with full robot dynamics. We present a probabilistically complete RRT motion planner that considers joint acceleration limits and potentially non-zero start and goal velocities. It uses a fast, non-iterative steering method. We demonstrate both the power and efficiency of our planner using the problem of hitting a nail with a hammer, which requires the robot to reach a given goal velocity while avoiding obstacles. Our planner is able to solve this problem in less than 100 ms. In contrast, a purely geometric planner is unable to hit the nail at the desired velocity, whereas a standard kinodynamic RRT is multiple orders of magnitude slower.
Source code on GitHub
- T. Kunz, M. Stilman. Probabilistically Complete Kinodynamic Planning for Robot Manipulators with Acceleration Limits. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014. [pdf] [mp4] [youtube]
- T. Kunz, M. Stilman. Kinodynamic RRTs with Fixed Time Step and Best-Input Extension Are Not Probabilistically Complete. International Workshop on the Algorithmic Foundations of Robotics (WAFR), 2014. [pdf]
- T. Kunz. Time-Optimal Sampling-Based Motion Planning for Manipulators with Acceleration Limits. Dissertation, Georgia Institute of Technology, 2015. [pdf] [url]
Dynamic Butler Trajectories
During my internship at Willow Garage I worked on a project to enable the PR2 to quickly transport objects on a tray without them falling off. This effort in conjunction with the sushi challenge aim to give robots the ability to perfrom tasks like efficient transport of every day objects and dynamic place setting. Dynamic trajectories are important for robots to execute delivery or butler tasks at home in a timely manner. The problem also appears in industrial robotics when objects are transported on tray-like end-effectors at high speeds. An identical problem is that of carrying an open container of liquid. Just keeping the tray horizontal is not enough to keep the object from sliding off when moving fast. Instead, the tray needs to be tilted in a way that minimizes lateral force on the object.
Press Coverage: IEEE Spectrum, Willow Garage
Manipulation Planning with Soft Task Constraints
We present a randomized configuration space planner that enforces soft workspace task constraints. A soft task constraint allows an interval of feasible values while favoring a given exact value. Previous work only allows for enforcing an exact value or an interval without a specific preference. Soft task constraints are a useful concept in everyday life. For example when carrying a container of liquid we want to keep it as close to the upright position as possible but want to be able to tilt it slightly in order to avoid obstacles. This paper introduces the necessary algorithms for handling such constraints, including projection methods and useful representations of everyday constraints. Our algorithms are evaluated on a series of simulated benchmark problems and shown to yield significant improvement in constraint satisfaction.
- T. Kunz, M. Stilman. Manipulation Planning with Soft Task Constraints. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2012. [pdf] [url] [mp4] [youtube]
Time-Optimal Path Following with Bounded Acceleration and Velocity
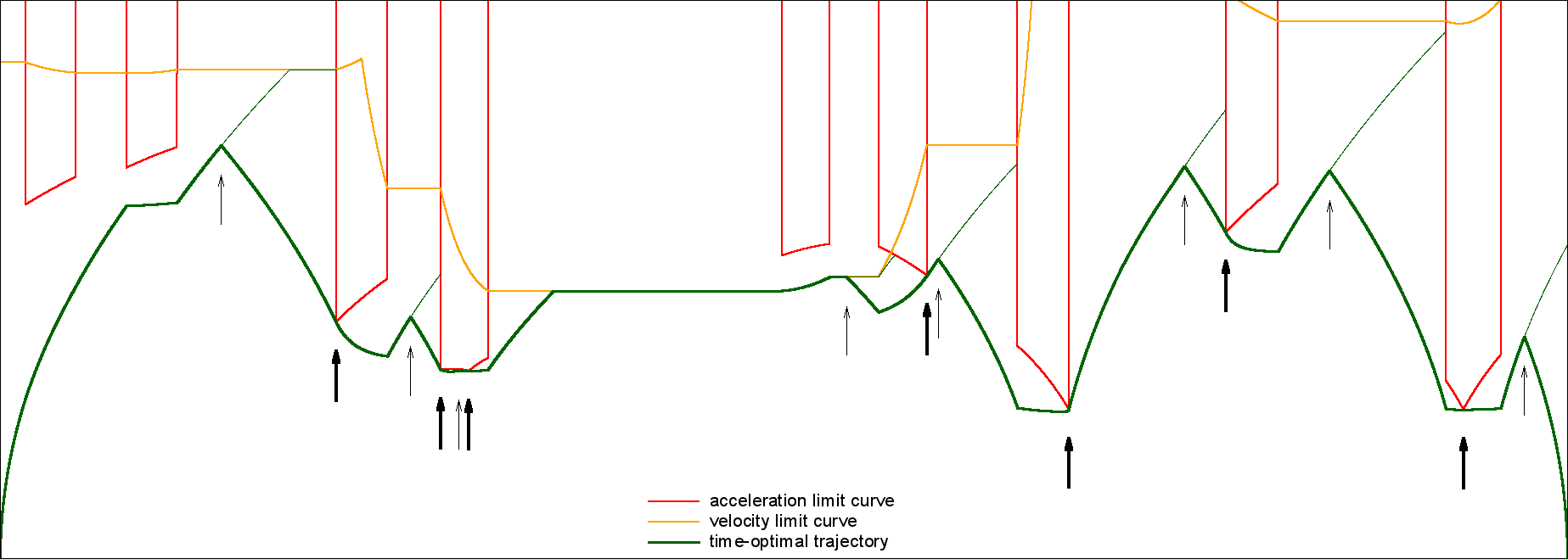
We present a novel method to generate the time-optimal trajectory that exactly follows a given differentiable joint-space path within given bounds on joint accelerations and velocities. We also present a path preprocessing method to make nondifferentiable paths differentiable by adding circular blends. We introduce improvements to existing work that make the algorithm more robust in the presence of numerical inaccuracies. Furthermore we validate our methods on hundreds of randomly generated test cases on simulated and real 7-DOF robot arms. Finally, we provide open source software that implements our algorithms.
Source code on GitHub
- T. Kunz, M. Stilman. Time-Optimal Trajectory Generation for Path Following with Bounded Acceleration and Velocity. Robotics: Science and Systems (RSS), 2012. [pdf] [url]
Robot Sword Fighting
We introduce and experimentally validate a novel algorithmic model for physical human-robot interaction with hybrid dynamics. Our computational solutions are complementary to passive and compliant hardware. We focus on the case where human motion can be predicted. In these cases, the robot can select optimal motions in response to human actions and maximize safety. By representing the domain as a Markov Game, we enable the robot to not only react to the human but also to construct an infinite horizon optimal policy of actions and responses. Experimentally, we apply our model to simulated robot sword defense. Our approach enables a simulated 7-DOF robot arm to block known attacks in any sequence. We generate optimized blocks and apply game theoretic tools to choose the best action for the defender in the presence of an intelligent adversary.
Press Coverage: IEEE Spectrum
- T. Kunz, P. Kingston, M. Stilman, M. Egerstedt. Dynamic Chess: Strategic Planning for Robot Motion. IEEE International Conference on Robotics and Automation (ICRA), 2011. [pdf] [url] [mp4] [youtube]
Real-Time Path Planning in Changing Environments
We present a practical strategy for real-time path planning for articulated robot arms in changing environments by integrating PRM for Changing Environments with 3D sensor data. Our implementation on Care-O-Bot 3 identifies bottlenecks in the algorithm and introduces new methods that solve the overall task of detecting obstacles and planning a path around them in under 100 ms.
A fast planner is necessary to enable the robot to react to quickly changing human environments. We have tested our implementation in real-world experiments where a human subject enters the manipulation area, is detected and safely avoided by the robot. This capability is critical for future applications in automation and service robotics where humans will work closely with robots to jointly perform tasks.
- T. Kunz, U. Reiser, M. Stilman, A. Verl. Real-Time Path Planning for a Robot Arm in Changing Environments. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2010. [pdf] [url] [mp4] [youtube]
- T. Kunz. Real-Time Motion Planning for a Robot Arm in Dynamic Environments. Diplom thesis, University of Stuttgart, 2009. [pdf]
Robot Limbo
We present successful control strategies for dynamically stable robots that avoid low ceilings and other vertical obstacles in a manner similar to limbo dances. Given the parameters of the mission, including the goal and obstacle dimensions, our method uses a sequential composition of IO-linearized controllers and applies stochastic optimization to automatically compute the best controller gains and references, as well as the times for switching between the different controllers. We demonstrate this system through numerical simulations, validation in a physics-based simulation environment, as well as on a novel two-wheeled platform. The results show that the generated control strategies are successful in mission planning for this challenging problem domain and offer significant advantages over hand-tuned alternatives.